

科学研究 /2024-3-22 15:8
汕尾校区唐小煜师生团队在TIM、ICRA、TMECH发表代表性成果
近期,汕尾校区行知书院“一站式”学生课外实践创新基地机器人与智能感知实验室唐小煜师生团队在智能感知与控制领域取得系列重要进展,相关工作发表在学校学科代表性成果推荐目录、领域权威期刊《IEEE Transactions on Instrumentation & Measurement (TIM)》《IEEE/ASME Transactions on Mechatronics (TMECH)》、领域顶会《The 2024 IEEE International Conference on Robotics and Automation (ICRA)》、领域重要期刊《IEEE Sensors Journal》《ACM Transactions on Asian and Low-Resource Language Information Processing》。
汕尾校区植根世界一流大学建设需求,持续推进书院学院协同育人,深化“一站式”学生社区建设,坚持“立德树人,知行合一,追求卓越,自主发展”人才培养理念,办学三年育人成效显著。机器人与智能感知实验室师生团队坚持服务国家重大战略需求和区域经济社会发展需要,探索新质生产力的时代内涵,立足汕尾融湾优势投身“百千万工程”建设,加强与广州、佛山、深圳、香港高校及企业开展科研合作,将人工智能技术应用于感知与控制领域,取得阶段性成果。相关工作与同济大学、香港科技大学、中国移动汕尾分公司等高校、企业合作,得到物理学院、电子与信息工程学院的大力支持。
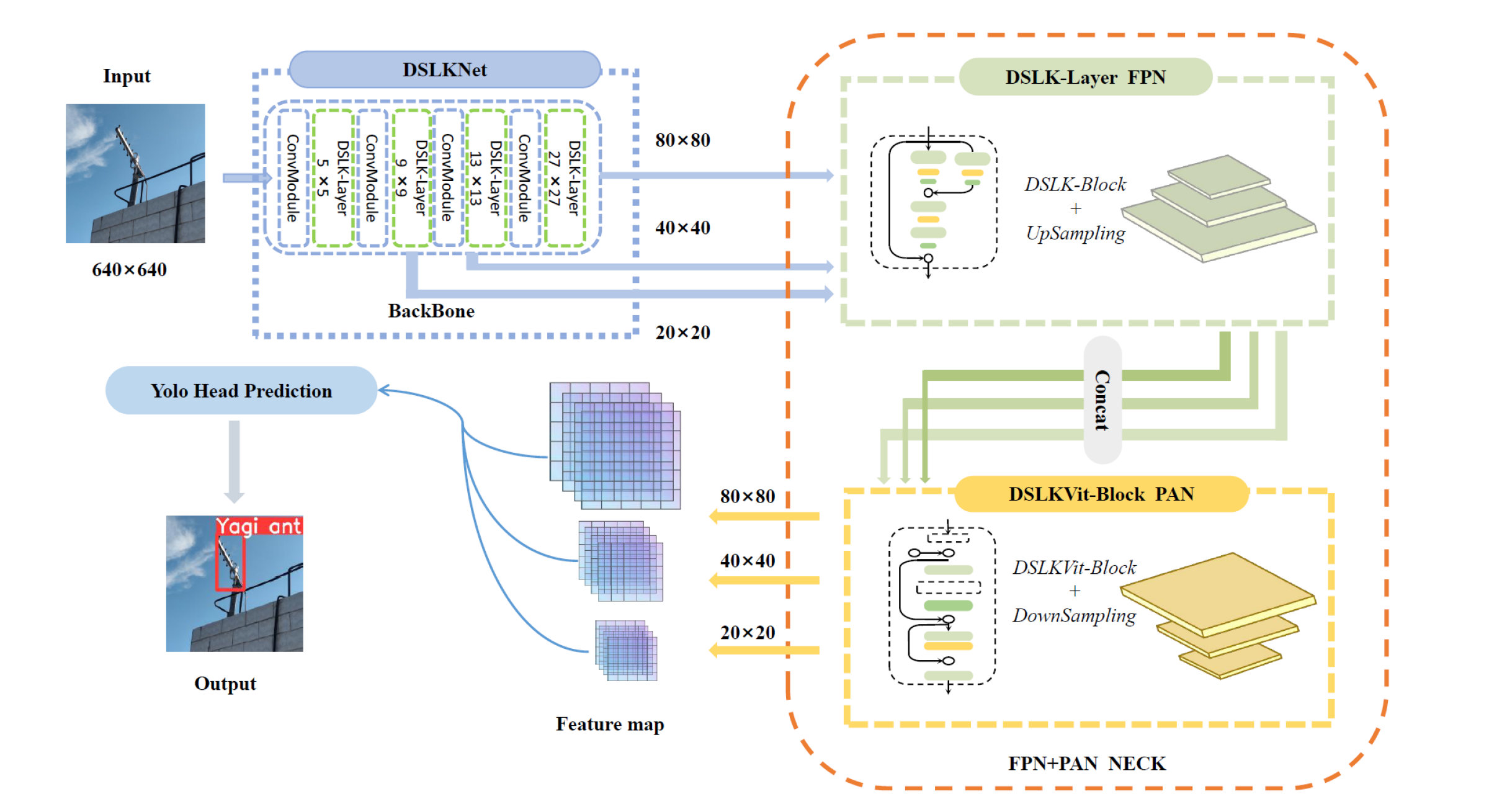
论文“YOLO-Ant: A Lightweight Detector via Depthwise Separable Convolutional and Large Kernel Design for Antenna Interference Source Detection”在《IEEE Transactions on Instrumentation & Measurement》在线发表(TIM:中科院二区Top,JCR Q1,IF: 5.6,学校学科代表性成果推荐目录期刊)。团队针对乡镇无线信号干扰问题,制作目标检测领域第一份干扰源天线数据集,提出一个干扰源天线的检测模型YOLO-Ant,引入一种大卷积核与深度可分离卷积的新模块,结合轻量设计的Transformer结构,解决在无人机天线检测工作中目标尺寸小、复杂背景以及类间差异大等问题。该工作主要由唐小煜、陈兴铭、程锦涛完成,与同济大学范睿团队、香港科技大学吴荩团队和中国移动汕尾分公司合作,得到国家自然科学基金项目(62001173, 42074038),广东大学生科技创新培育专项资金(“攀登计划”专项资金)项目(pdjh2022a0131, pdjh2023b0141)的支持。论文链接:https://doi.org/10.1109/tim.2024.3379397,项目开源链接:https://github.com/SCNU-RISLAB/YOLO-Ant。
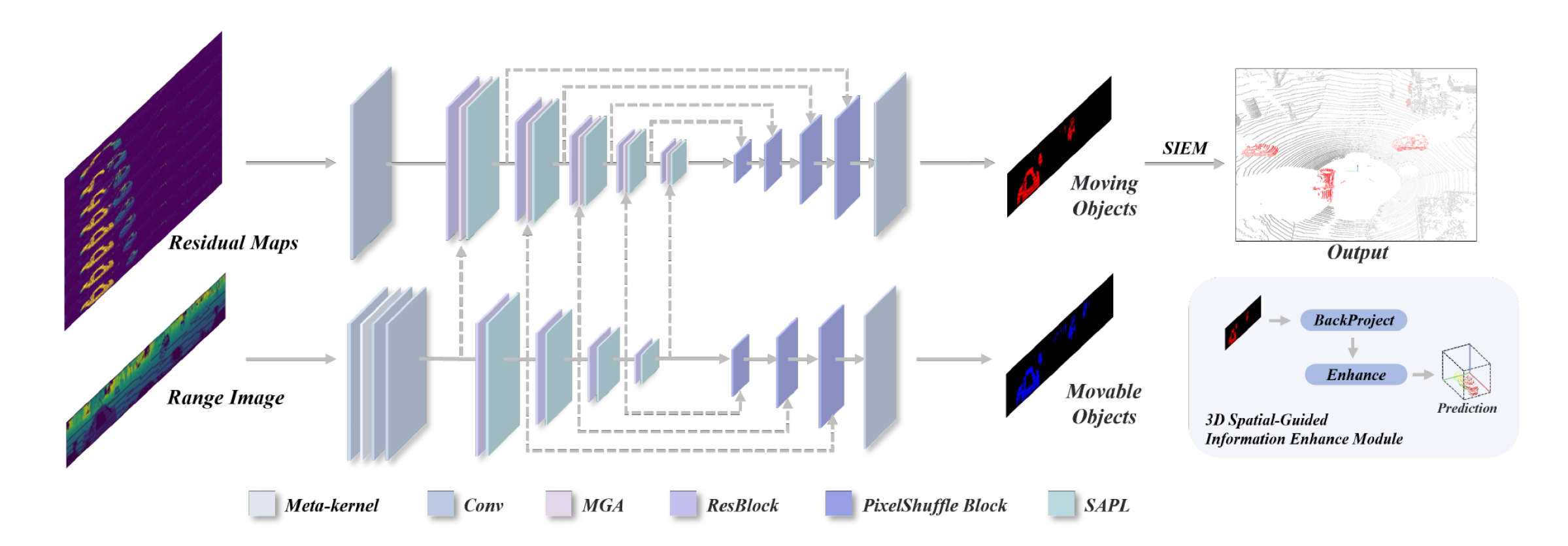
论文“MF-MOS: A Motion-Focused Model for Moving Object Segmentation”在《The 2024 IEEE International Conference on Robotics and Automation》发表(ICRA:领域顶会,CCF-B,学校学科代表性成果推荐目录期刊,谷歌学术机器人领域排名第一)。团队针对自动驾驶领域的运动对象分割(MOS)提出一种创新的双通路运动聚焦模型MF-MOS,用于分割激光雷达点云中的运动目标,显著提高了基于激光雷达的运动对象分割性能。工作主要由唐小煜、程锦涛、曾康完成,与同济大学范睿团队、香港科技大学吴荩团队合作,得到国家自然科学基金项目(62001173, 62233013),广东大学生科技创新培育专项资金(“攀登计划”专项资金)项目(pdjh2022a0131, pdjh2023b0141)的支持。论文链接:https://doi.org/10.48550/arXiv.2401.17023,项目开源链接:https://github.com/SCNU-RISLAB/MF-MOS。
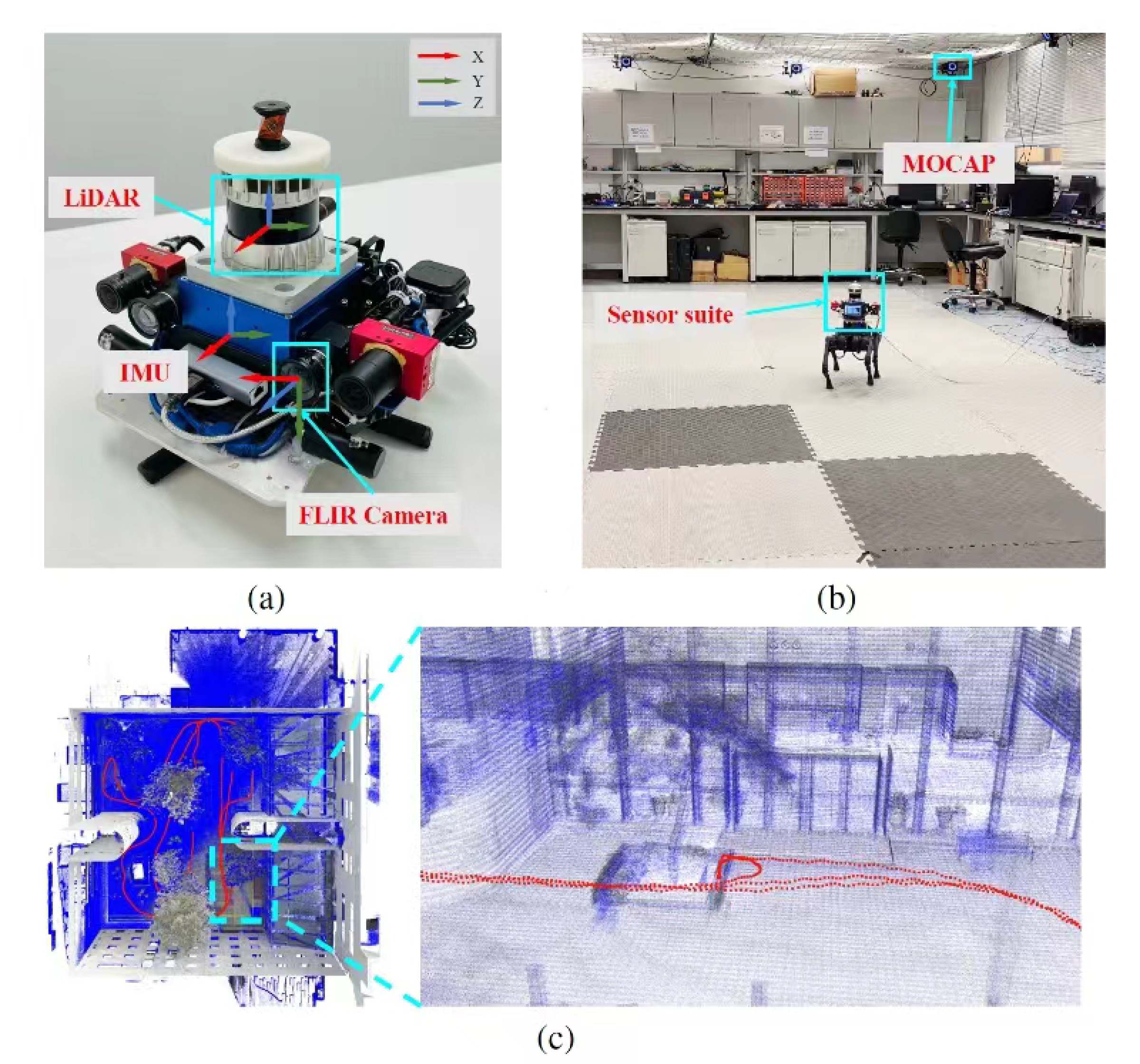
论文“PALoc: Advancing SLAM Benchmarking with Prior-Assisted 6-DoF Trajectory Generation and Uncertainty Estimation”在《IEEE/ASME Transactions on Mechatronics》在线发表(TMECH:中科院一区Top,JCR Q1,IF:6.4)。团队利用先验地图辅助框架,首次生成密集的六自由度(6-DoF)真实轨迹(GT)姿态,显著提高了室内外环境下SLAM(同时定位与地图构建)基准测试的真实性。该工作由唐小煜与港科大吴荩团队合作完成。论文链接:https://doi.org/10.48550/arXiv.2401.17826 ,项目开源链接:https://github.com/JokerJohn/PALoc。
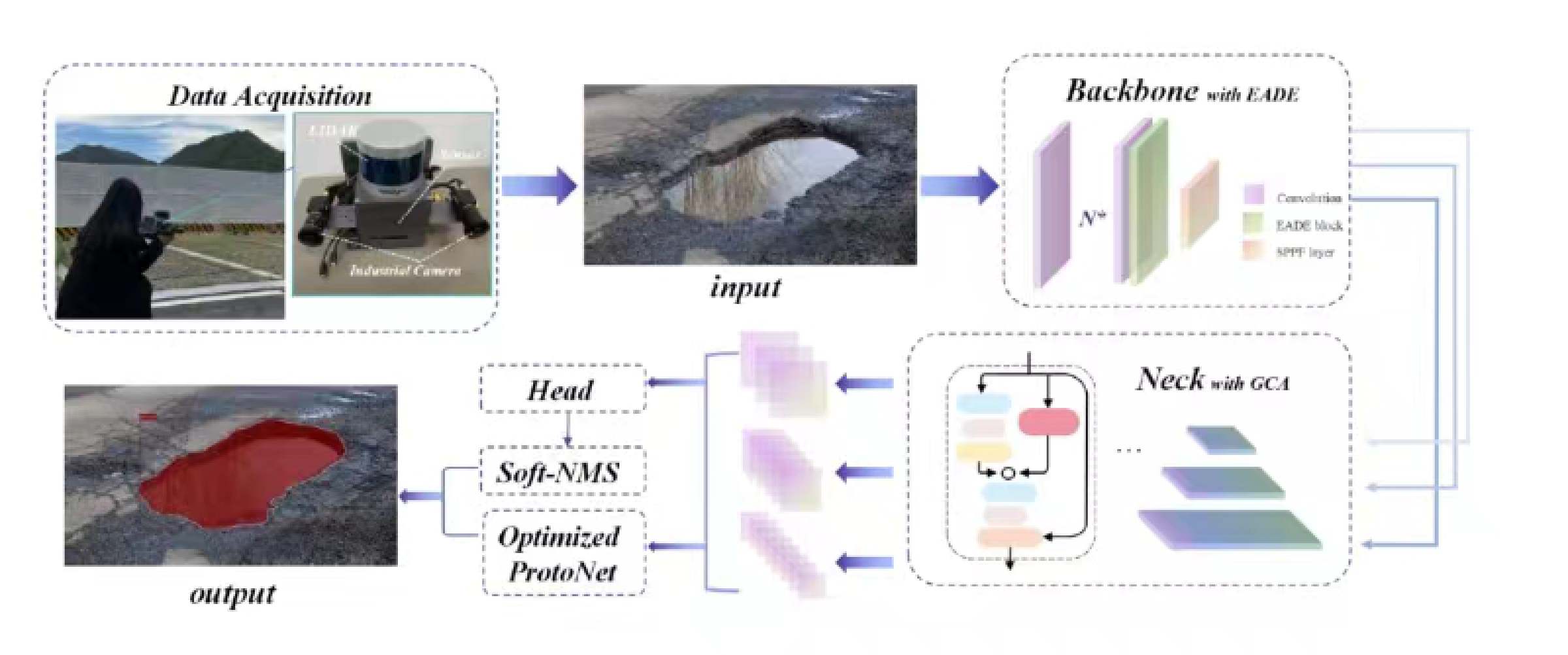
论文“LEPS: A lightweight and effective single-stage detector for pothole segmentation”在《IEEE Sensors Journal》在线发表(JSEN:中科院二区,JCR Q1,IF:4.325)。团队针对智慧城市建设中道路坑洞的识别和定位问题,提出了一种用于实现高效道路坑洞检测和实例分割的轻量级LEPS单阶段检测器,模型能够高效地提取和融合特征,实现细粒度精确分割,满足检测要求的同时实现轻量级需求。该工作主要由唐小煜、黄晓宁、向秋驰、董骏完成,与同济大学范睿团队、香港科技大学吴荩团队合作,得到国家自然科学基金项目(62001173, 62233013),广东大学生科技创新培育专项资金(“攀登计划”专项资金)项目(pdjh2022a0131, pdjh2023b0141),大学生创新创业计划项目(202351001)的支持。论文链接:https://ieeexplore.ieee.org/document/10315064,项目开源链接:https://github.com/SCNU-RISLAB/Pothole-YOLO。
字号:小中大
推荐
重磅!华师,国家科技大奖新突破!
华师拟录取,等你确认!
华师2026年夏季高考招生章程!发布!
中法双学位!华师新学院,正式招生!
华师校友执导,《给阿嬷的情书》请你看!
华师奖学金名单公布,他们上榜!
华师26-27校历发布!请查收!
44名!华师公开招聘工作人员!
华师42个微专业招生!就等你!
华师调剂办法,今日发布!
影像
微信

抖音

校报

微博
电子邮件
xiaobao@m.scnu.edu.cn
访问量
累积:300250529
今日:78657
版权所有
华南师范大学党委宣传部
华南师范大学新闻中心
Copyright © 2001-2024
news.scnu.edu.cn. All rights reserved.
技术支持:广州可媒